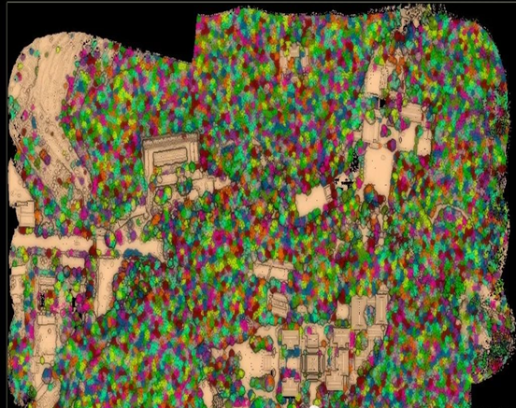
激光雷达的点云精度是指激光雷达设备在扫描过程中获取的空间点数据集的准确性,这通常包括三维坐标(XYZ)和激光反射强度(Intensity)。
点云数据是通过激光雷达发射激光束并接收从目标物表面反射回来的激光脉冲来获取的。每个点云包含了空间中一个特定点的位置信息,以及该点的反射强度信息。反射强度与目标物的材质、粗糙度、激光入射角度、波长和雷达的能量密度有关。
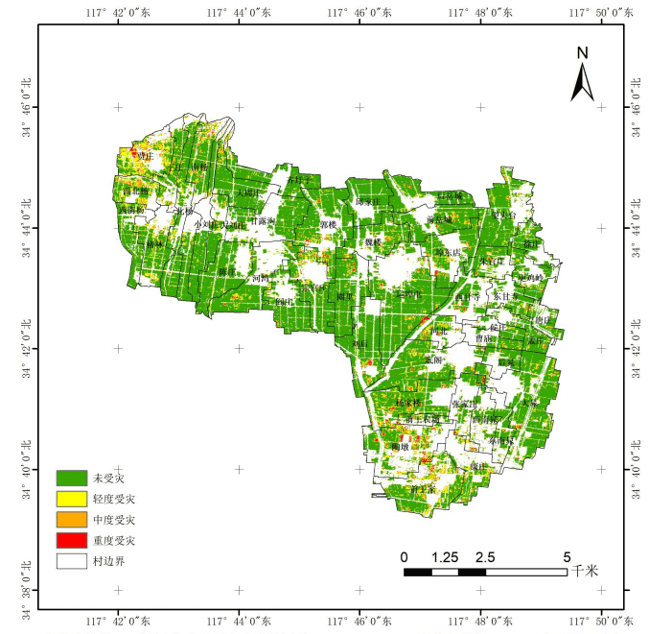
点云数据的精度高,意味着空间坐标信息准确,这对于资源勘探、城市规划、农业开发等多个领域至关重要。激光雷达扫描仪提供的传感器数据以3D点云的形式表示,每个点都有(x, y, z)坐标和其他属性,如反射强度。
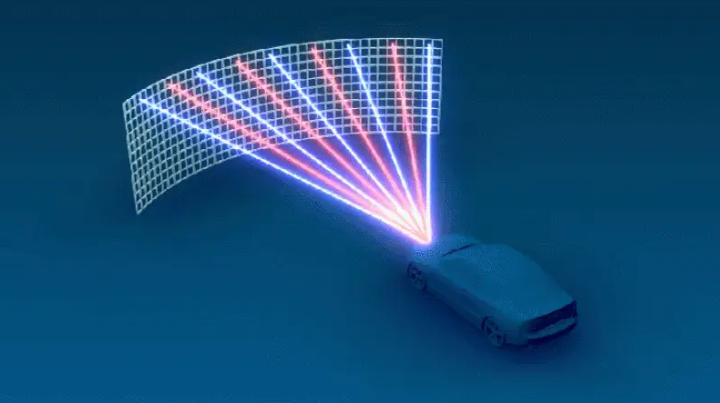
角分辨率是影响点云精度的一个重要因素,它指的是相邻两个点之间的夹角。帧率则表示激光雷达每秒钟完成一圈扫描的次数。角分辨率和帧率之间存在关系,采样率一定时,帧率越高,角分辨率越低;反之亦然。
总的来说,激光雷达的点云精度是由多种因素决定的,包括设备的技术参数、环境条件以及被测物体的特性。高精度的点云数据对于实现精确的三维建模和分析至关重要,因此在选择激光雷达设备时,需要根据具体的应用场景和需求来确定合适的技术和配置。
本文URL:https://www.geosuntech.com/News/174.html
上一篇:激光雷达参数中,定位精度中的水平精度0.02m 的意思?
下一篇:激光雷达的俯仰角精度是什么?