此次应客户要求,际上导航在某无人矿区展开相关测试。本次参与测试的产品为我司自研设计开发的GS-130X多平台激光雷达系统——是集成长距离、高精度激光传感器和惯性导航系统,可以满足不同环境下的测绘任务,内置高分辨数字相机,提供正射影像与三维点云的完美结合。
测试场景:激光雷达放置引擎盖上

测试结果:


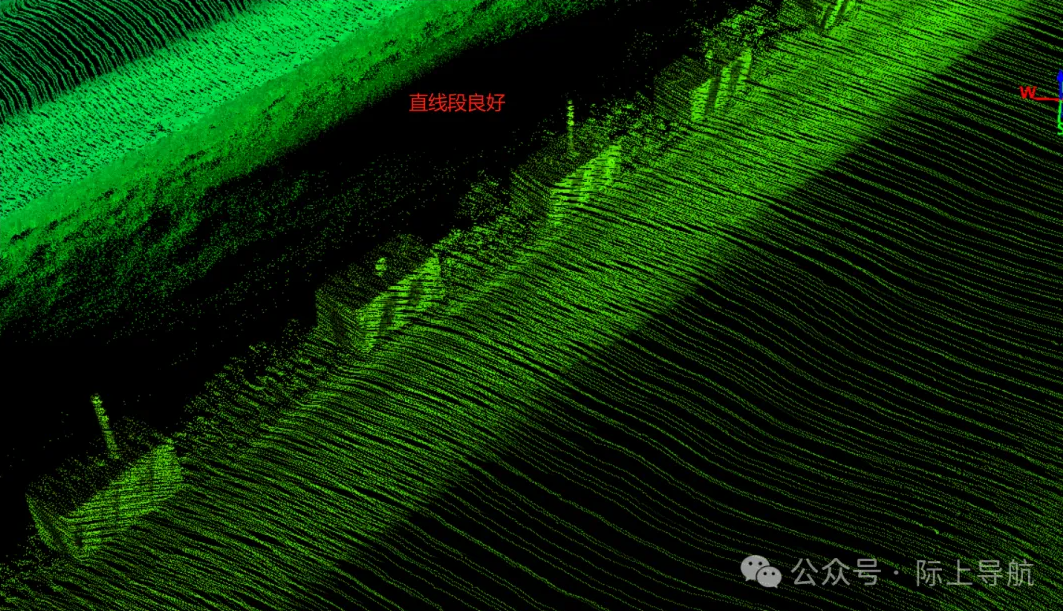
石墩验证点平面普遍相差30-35cm。厚度7cm,验证点有在石墩边角的,不便于测试高程精度,泥土地上高程精度7cm ,山地路平均20km/h,点密度2800p/㎡, 转弯出石墩出现部分错位,平均错位20cm,直线段正常,且并不是每个转弯处存在错位。

测试结果
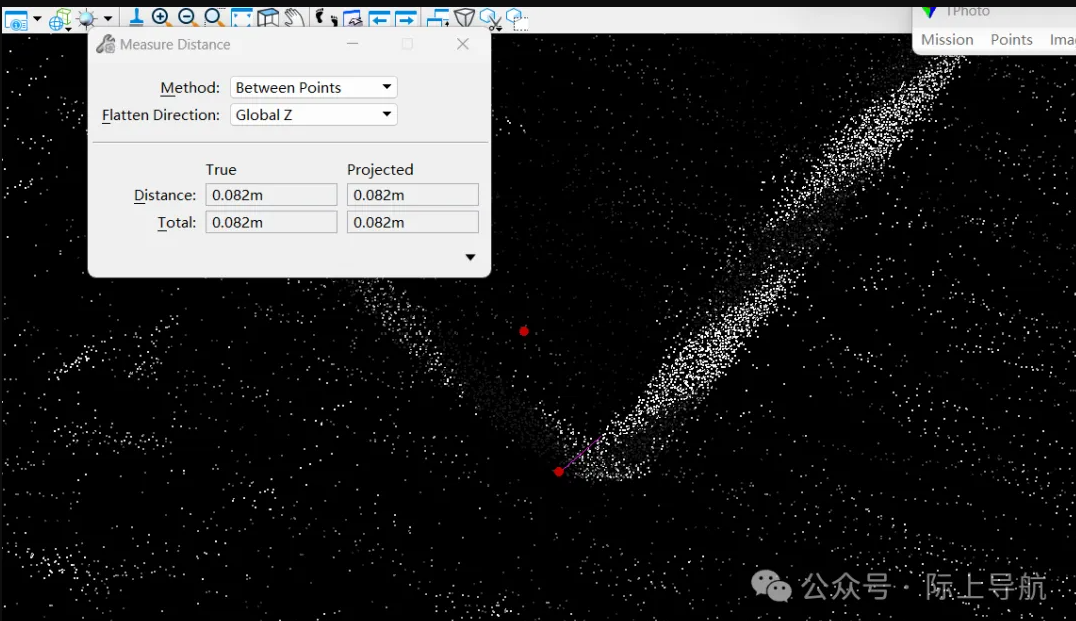
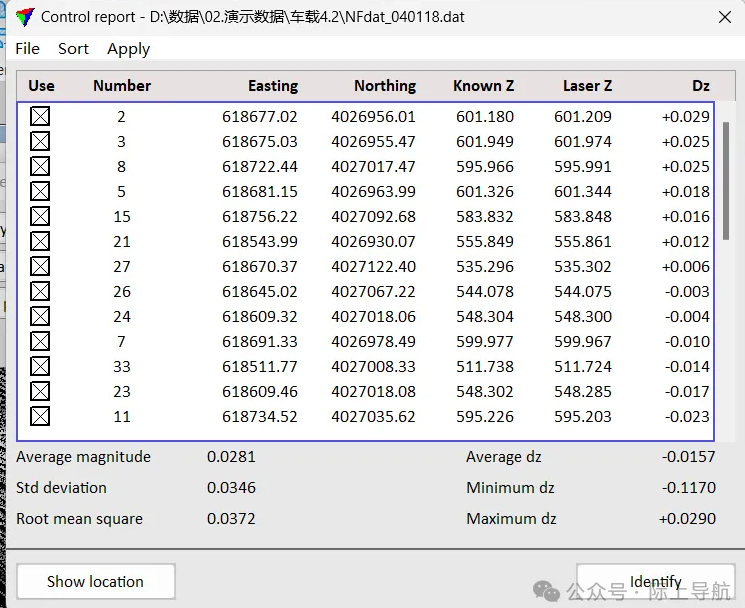
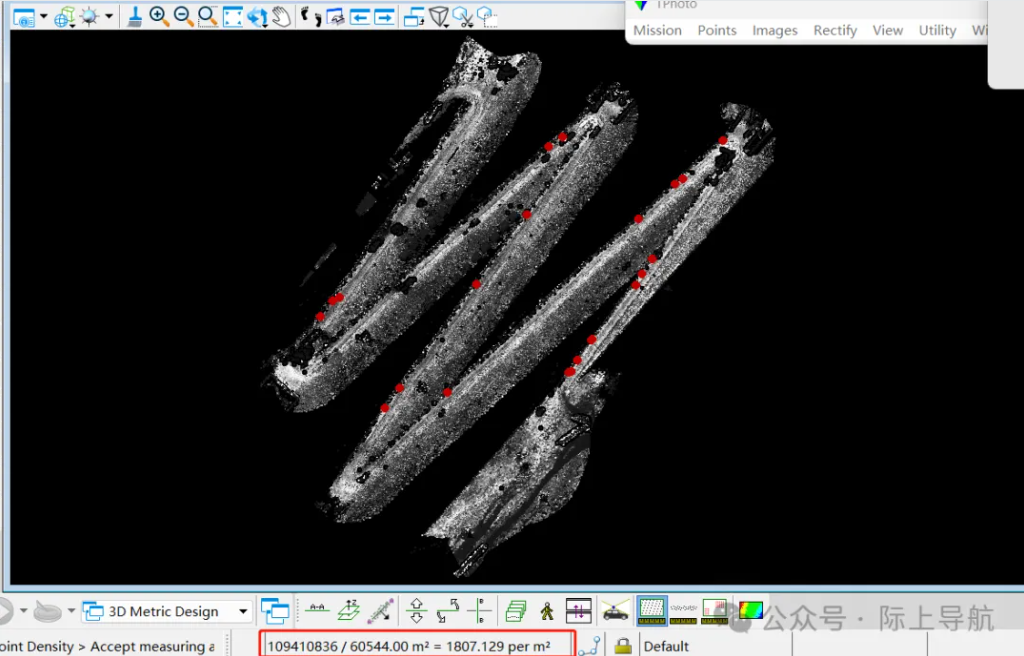
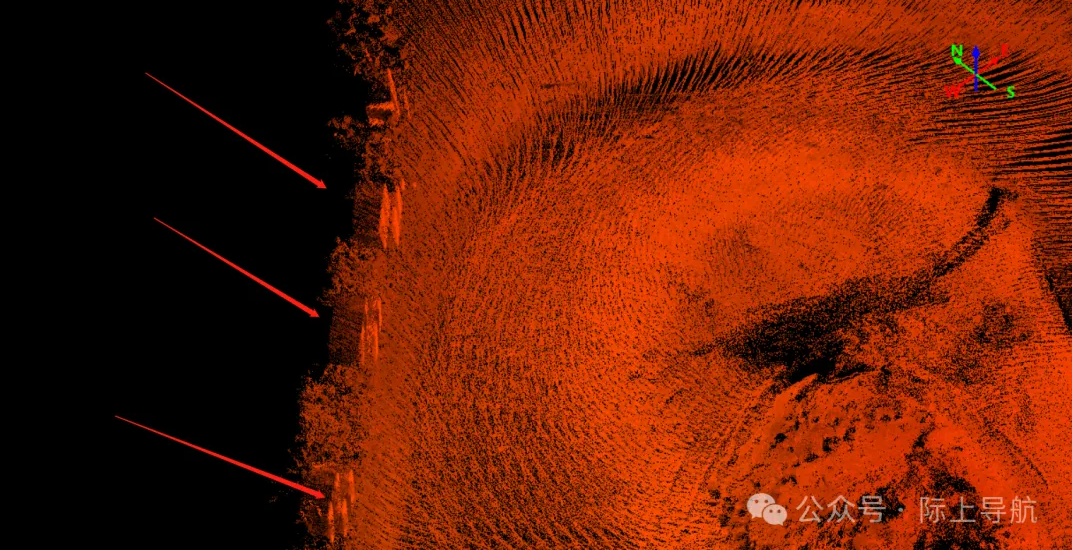
使用基站模式ppk解算,平面精度8-15cm,泥土地高程精度3.7cm,厚度4cm,点密度1800p/㎡,由于更改了安装位置,有部分点有遮挡过滤掉了,转弯局部存在分层。
本次测试得出以下几点:
1、根据检查点误差值判断,基站模式更稳定,颠簸路段的通过改善减震效果有明显提升;
2、场景三对比得出,急转弯出会出现错位情况,在公路上转弯姿态稳定基本不出现;
3、颠簸路段与平整公路区别不大,基本平面都控制在15cm左右。高程精度有3cm左右提升,厚度有所改善,也可能跟过滤点有关系,后期需注意转弯处姿态晃动大的问题;
4、同样安装位置,速度40km/h和20km/h点密度分别为1800p/㎡和800p/㎡。
本文URL:https://www.geosuntech.com/News/221.html
上一篇:际上导航参加2024“武创荟”•双谷联动汽车产业创新发展对接活动
下一篇:返回列表