
◆ 操作简单
支持参数记忆和导出导入,参数配置简单,向导式操作流程,仅需几步设置即可实现一键解算。
◆ 支持航带平差
点云优化至2-3cm输出彩色点云,同时使用高精度的POS结果,为点云数据提供直接地理信息参考。
◆ 数据解算适用性强
可对直升机、无人机、车载、船载、手持等移动激光雷达扫描设备采集的数据进行解算。
◆ 激光雷达传感器选择范围广
涵盖市面上常用激光雷达传感器,包括但不限于Livox、Riegl、Hesai、珞珈伊云等设备
◆ 解算范围多样化
解算时,可进行距离过滤、角度过滤、GNSS时间拆分、范围过滤、激光线过滤等,剔除不需要的数据。
◆ 坐标转换自主化
解算过程中可进行坐标转换,将点云转换到客户需求的坐标系。
◆ 解算速度快
可以快速的解算激光雷达扫描系统获取的数据,生成LAS格式的点云。
上一篇:Shuttle高精度轨迹解算软件
下一篇:WPM际上导航定制航线规划软件
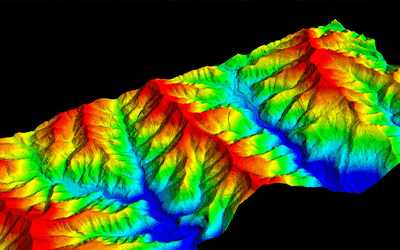
地形测绘

城市建设
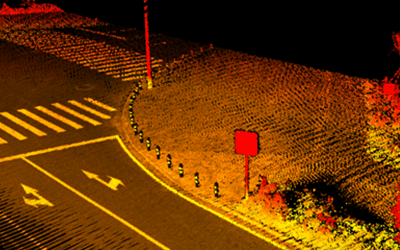
道路交通

电力巡检

矿山应用

林业调查

水利应用
