车载激光雷达的工作原理是通过发射激光束并接收从目标物体反射回来的信号来测量距离和其他相关信息。具体步骤如下:

激光发射:车载激光雷达使用一个或多个激光光源组成的阵列,这些激光光源可以精确控制发射的时间差,从而在一定角度范围内立体扫描物体。
信号接收:当激光束击中目标物体后,部分光波会被反射回来。车载激光雷达的接收系统会捕捉这些反射回来的光波,即目标回波。
数据处理:接收到的目标回波会与发射信号进行比较,经过信息处理系统的分析,可以得出目标物体的距离、方位角、高度、速度等参数。
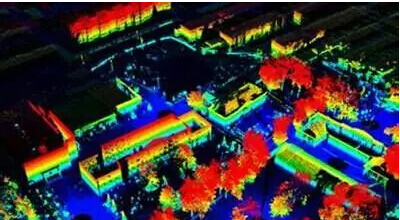
三维建模:通过对大量这样的测量点进行分析,车载激光雷达能够构建出目标物体的三维模型,这对于车辆的导航、避障和环境感知非常重要。
扫描方式:车载激光雷达的扫描方式有多种,包括机械式、转镜式等。转镜式激光雷达通过电机带动转镜运动,将光束反射至空间的一定范围,实现扫描探测。
时间飞行(TOF):车载激光雷达采用的测量方法类似于蝙蝠的测距方法,即通过计算激光往返的时间(Time of Flight)来确定距离。
综上所述,车载激光雷达是一种高精度的传感器技术,它能够在复杂的交通环境中为自动驾驶车辆提供精确的实时信息。随着技术的不断进步,未来的车载激光雷达将更加小型化、成本更低,且性能更稳定,为自动驾驶技术的发展提供重要支持。
本文URL:https://www.geosuntech.com/News/236.html
上一篇:车载激光雷达有什么具体用途?
下一篇:手持激光雷达应用场景有哪些?