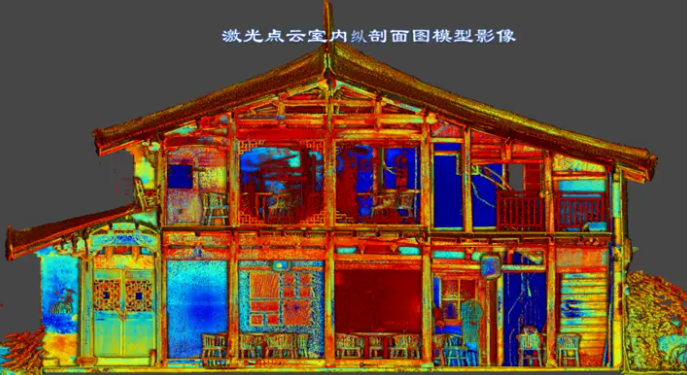
环境感知:激光雷达通过发射激光束并接收其反射波来测量周围物体的距离和速度。它能够创建车辆周围环境的高精度三维地图,帮助车辆理解其所处环境的细节。
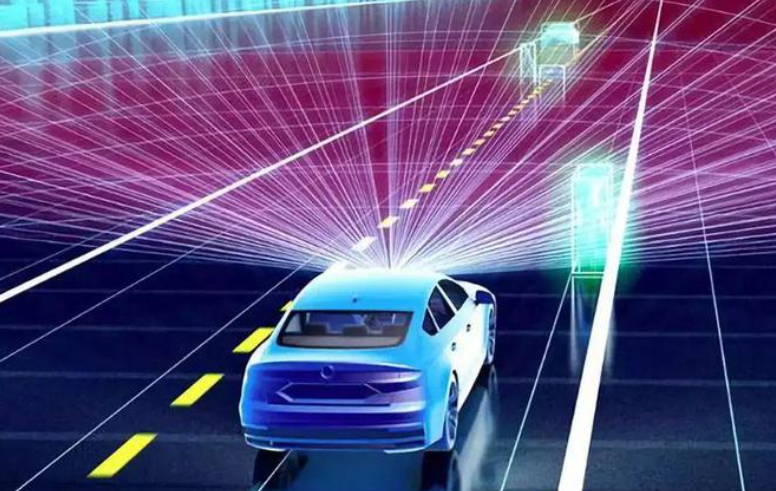
障碍物检测与避障:激光雷达能精确地探测静态和动态的障碍物,为车辆提供早期警告,以便执行紧急制动或规避动作,从而避免或减少碰撞事故的发生。
路径规划与导航:凭借对周围环境的精确了解,激光雷达有助于车辆进行有效的路径规划,确保选择最安全和最高效的行驶路线。
提升自动驾驶等级:目前许多车辆的自动驾驶功能处于L2级别,而要实现L3级别以上的自动驾驶,就需要更精确的环境感知能力,激光雷达在这里发挥着关键作用。
适应恶劣天气和光线条件:与传统摄像头相比,激光雷达受逆光、低照度以及恶劣天气条件(如雾、雨)的影响较小,能够在多种环境下稳定工作。
数据融合优势:激光雷达的数据可以与其他传感器(如毫米波雷达、摄像头)数据相结合,以获得更全面、更准确的环境信息,增强系统的整体性能。
提高识别准确度:由于激光雷达提供的是三维立体数据,因此它能更清晰地识别物体,包括行人、自行车、其他车辆等,这对于复杂交通环境中的安全驾驶至关重要。
综上所述,车载激光雷达是实现高级自动驾驶功能的关键技术之一,它通过提供精确的实时三维环境数据,使车辆能够更安全、更有效地自主行驶。随着技术的不断进步和成本的降低,预计未来激光雷达将在更多汽车中得到广泛应用。
本文URL:https://www.geosuntech.com/News/235.html
上一篇:半固态激光雷达的分类
下一篇:车载激光雷达工作原理是什么?