车载激光雷达通过以下方式实现车辆跟踪定位:

高精度定位:利用激光雷达进行SLAM(同步定位与地图构建),结合环路检测或与预先制作的高精度地图匹配,可以实现厘米级的定位精度。这种定位方法在百度、谷歌以及通用汽车的超级巡航中得到了应用,其中通用汽车已经绘制了美国所有高速公路的激光地图以支持其自动驾驶功能。
目标分类识别和轨迹跟踪:激光雷达结合摄像头数据,可以对检测到的目标进行分类识别,并跟踪它们的轨迹。这一点对于理解周围环境和其他车辆的行为至关重要。
位姿估计:在过去二十年里,激光雷达已经成为移动机器人定位和建图的标准传感器。它能够提供自身的位姿信息,这对于自动驾驶汽车的导航至关重要。基于激光雷达的全局定位技术包括地点检索和局部位姿估计,以及将单次测量升级为连续测量以实现连续的全局定位。
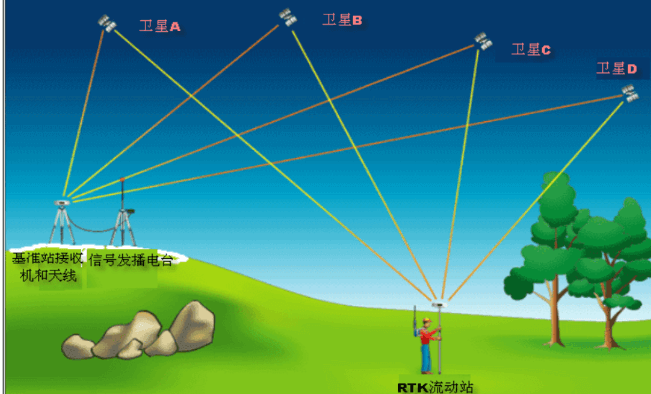
多传感器融合:除了激光雷达,自动驾驶汽车还使用GNSS(全球导航卫星系统)、RTK(实时运动定位)和惯性导航系统等多种技术来确定其确切位置。这些技术相互补充,提高了定位的准确性和可靠性。
总的来说,车载激光雷达在智能驾驶汽车中的车辆跟踪定位方面发挥着关键作用,其通过高精度定位、目标分类识别和轨迹跟踪、位姿估计和多传感器融合等技术手段,确保了智能驾驶汽车能够准确了解自己在环境中的位置,从而安全高效地进行导航和行驶。
本文URL:https://www.geosuntech.com/News/210.html
下一篇:智能驾驶汽车中如何做到行人检测?